
Funcionamento básico de uma aeronave multi-rotor
Controlar o movimento de uma aeronave no ar é fundamental para o voo.
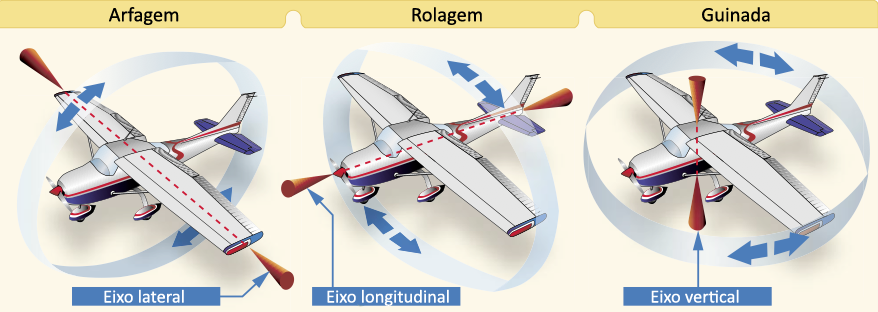
O nome disso é “Controle de Atitude“. Existem basicamente 4 controles necessários para o voo em qualquer tipo de aeronave, seja de asa fixa, asa rotativa ou multi-rotor:
- Arfagem (Pitch)
- Rolagem (Roll)
- Guinada (Yaw)
- Potência (Throttle)
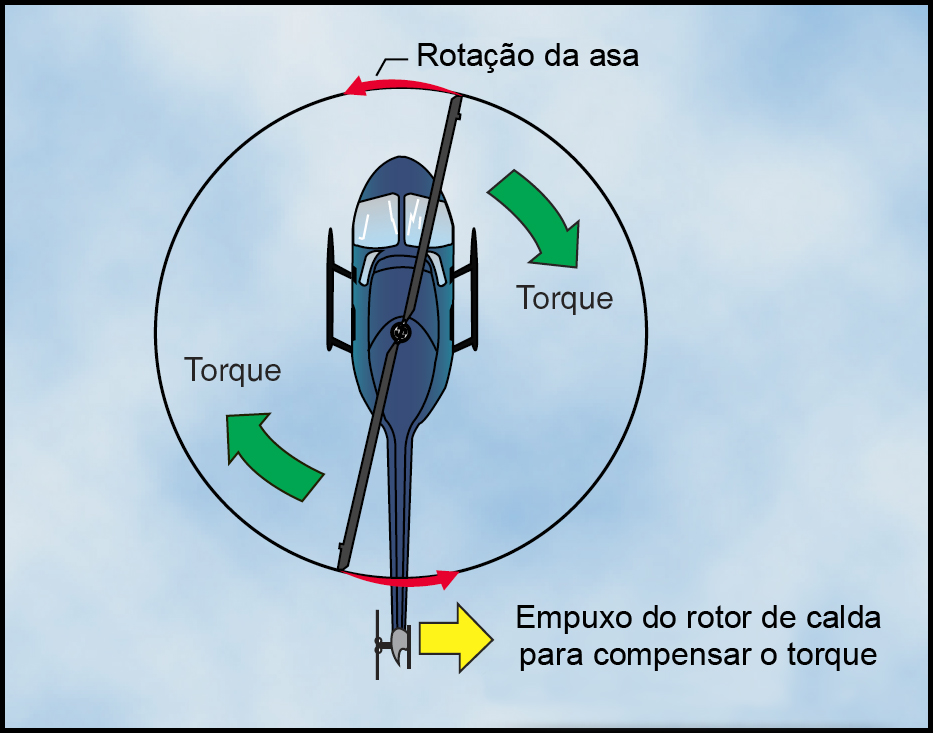
Um helicóptero convencional possui uma asa rotativa em cima da cabine (que a maioria das pessoas confunde com “hélice”), e um rotor de cauda (aquela hélice na cauda do aparelho – esta sim é uma hélice). Para voar, o motor gira a asa rotativa, mas a mesma força que faz a asa girar no sentido anti-horário, faz o restante do helicóptero tender a girar no sentido horário – o que não é desejável. A esta força damos o nome de “efeito torque“.
O rotor de cauda serve exatamente para compensar este efeito, ele vai gerar empuxo lateral na cauda para evitar que o helicóptero gire no sentido contrário ao da asa rotativa, e assim mantém a orientação desejada pelo piloto.
Para controlar Arfagem e Rolagem, o helicóptero altera o angulo de ataque e o avanço da asa rotativa, e para controlar a Guinada, ele apenas ajusta a velocidade do rotor de cauda. Para subir e descer verticalmente, ele ajusta o passo da asa e a aceleração do motor (mais potência, ele sobe, menos, ele desce).
Uma outra forma de controlar atitude em helicópteros é usando uma segunda asa rotativa, que gira no sentido oposto ao da primeira. Desta forma o torque do motor é exercido de maneira igual nas duas asas.

Neste tipo de helicóptero, o rotor de cauda é dispensado, pois o controle de Guinada é realizado reduzindo a velocidade de uma asa rotativa enquanto aumenta-se a velocidade da outra. A diferença de torque nas duas asas faz o helicóptero girar em seu próprio eixo vertical da maneira desejada pelo piloto. Mas os demais controles (de Arfagem e Rolagem) ainda são exercidos por meio de ajustes no passo e no avanço das asas rotativas.
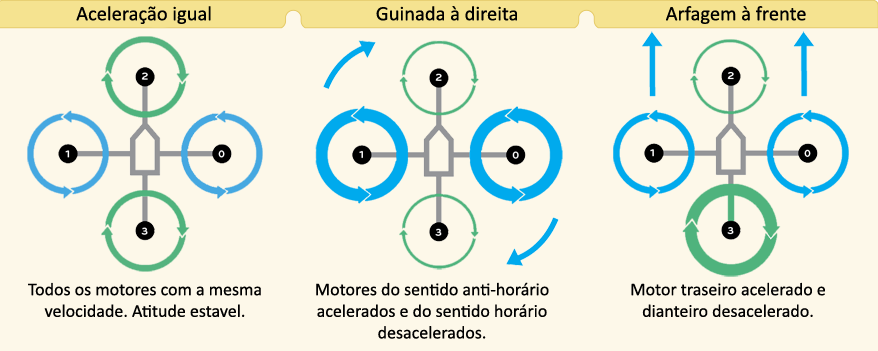
Nas aeronaves multi-rotor, como os quadricópteros, hexacópteros, octocópteros, decacópteros e outras configurações com 4 ou mais motores, o princípio de funcionamento é bem parecido: O controle de guinada é realizado exclusivamente por efeito torque, ao controlar individualmente a aceleração dos motores que giram no sentido horário e no sentido anti-horário. Porém, Arfagem e Rolagem são controladas controlando a aceleração motores laterais ou dianteiros e traseiros.
Para o aparelho inclinar para frente ou para trás (Arfagem), controla-se a aceleração dos motores dianteiros e traseiros. Para inclinar à direita ou à esquerda (Rolagem) controla-se a aceleração dos motores laterais. Para girar à direita ou à esquerda (Guinada), controla-se a aceleração de todos os motores, a fim de criar uma diferença de velocidade entre os que giram no sentido horário e os que giram no sentido anti-horário. Para controlar a altitude (subir ou descer), basta acelerar ou desacelerar todos os motores igualmente.
Essa configuração dispensa o uso de servo-motores, já que todo o controle de atitude pode ser realizado apenas controlando a aceleração de cada motor individualmente.
Em quase todas as aeronaves rádio-controladas é possível voar sem depender de muitos componentes eletrônicos. Geralmente apenas o receptor de rádio e os ESCs já são suficientes para um avião voar. No entanto, em aeronaves multi-rotor um computador de controle de voo é fundamental, pois de outra forma não seria possível controlar a velocidade de cada motor individualmente e ainda ter controle sobre a atitude do aparelho.
Para controlar cada motor, é preciso um pequeno computador eletrônico, capaz de comandar cada motor individualmente para controlar precisamente a sua velocidade, além de receber e processar informações sobre inclinação e giro em tempo real. Para isso é usado um giroscópio ligado diretamente ao computador de controle de voo (Flight Controller, ou FC). Normalmente o Flight Controller já vem com um giroscópio integrado em sua própria placa, além de outros instrumentos opcionais, como acelerômetro, barômetro, magnetômetro (bússola), voltímetro, entre outros.
Portanto a eletrônica embarcada em um quadricóptero (ou qualquer outro multicóptero) é fundamental para o seu funcionamento. Sem isso ele nem mesmo sai do chão.
Muito bom esse site !!
Obrigado amigo! Quando construir o seu drone me avise!
Amigo Vc poderia me ajudar , como construir (peças e fornecedores) este computador de navegação (“um pequeno computador eletrônico, ….entre outros”). Moro num local onde as pessoas costumam colocar fogo na vegetação, quando não cai um balão, aí quando Vc menos espera aparece um fogaréo e acaba queimando tudo, nossas arvores e roça inclusive…. fazemos uma barreira de terra nua , mas para que possamos visualizar o fogo antes de chegar a nós (tamanho, localização) precisamos de um quadricoptero possante. Pode nos ajudar?
Excelente . Esse artigo para pessoas que não tem nenhum conhecimento foi esclarecedor , me ajudou a entender quais caminhos devo seguir para chegar no meu primeiro drone. Muito obrigado!
Salve, amigo! Muito obrigado por este trabalho bastante elucidativo e de boa didatica! Te pergunto: se vc fosse montar um racer 250 e, eventualmente instalar um gimbal e um modulo GPS, qual FC, firmware e fork vc escolheria supondo um orcamento sem limites. Abs! Adoro motos, tenho uma 2T e outra 4T.
250 com Gimbal? Acho que não vai ficar muito bom amigo. Vai ficar pesado.
Eu vejo que você está tentando montar um “Mavic”… Drone pequeno com estabilização de imagem. Neste caso, recomendaria um frame de 280, que te permite usar hélices de 6 com folga.
Quanto a pergunta: Controladora SP Racing F3 Deluxe (boa e barata) com firmware iNavFlight.
Boa tarde!!!
Estou apanhando para instalar um gimbal num F330. Ou coloco bateria ou o gimbal, alguma sugestão?
Sou iniciante nessa área de drones, meu conhecimento e muito vago por enquanto, ainda quero expandir ainda mais, porém preciso de um norte para onde deve começar, oque voce me recomenda?
Obs: estou pensando em montar um drone racing ou compra um kit pronto.
Parabéns pelo ótimo trabalho,
Sou novo nesse hobby e estou querendo montar meu primeiro drone mas tenho várias dúvidas uma delas é sobre o modo Headless esse modo vem em todas controladora para f450 ou não existe esse modo em f 450 ? Desde já agradeço e perdoe minha ignorância como eu disse sou novo kk